In a groundbreaking advancement within the domain of miniature robotics, a research team from Harbin Institute of Technology has unveiled a new class of reconfigurable piezoelectric robots on the centimeter scale. These robots distinguish themselves through the incorporation of a sophisticated built-in ceramic actuation unit, marking a notable departure from conventional reconfigurable robotic designs. Published in the esteemed journal Engineering, this innovation offers transformative implications for the design and application of small-scale, flexible robotic systems.
Traditional approaches to reconfigurable robots have historically depended on electromagnetic motors coupled with complex transmission mechanisms. While effective at larger scales, these components pose significant challenges in terms of miniaturization. Their bulkiness and mechanical complexity severely restrict usability within confined spaces, a critical limitation for applications necessitating compact, adaptable robotic systems. The novel piezoelectric robots overcome these barriers with a fundamentally different actuation strategy.
Piezoelectric actuation is prized for its rapid response times, structural simplicity, and elimination of transmission components. The researchers have leveraged these inherent benefits by integrating a compact ceramic-based actuation unit measuring just 44 mm by 10 mm by 12.5 mm and weighing a mere 6.50 grams. This actuator operates at the first-order bending resonant vibration mode, enabling precise generation of oblique trajectories through an impact-jump motion of the robot’s driving feet. Such dynamic actuation delivers a locomotion speed reaching an impressive 90.3 body lengths per second, alongside a payload capacity exceeding 31 times the robot’s own weight.
Central to the design is an ingeniously engineered, highly integrated module that not only houses the piezoelectric actuator but also fuses control systems, wireless communication capabilities, and power sources within a single untethered unit. This integration facilitates streamlined operation, achieving speeds of up to 590 millimeters per second under stable wireless control. To bolster adaptability, the module’s housing incorporates multiple magnetic connection points, enabling versatile assembly into various topologies including chain and ring configurations. This modularity is critical for tailoring the robot’s structural arrangement to task-specific requirements.
A novel evaluation methodology accompanies the modular design, enabling systematic assessment of possible configurations. This approach calculates configuration weights based on ratios of end and side connections, thereby identifying optimal structures for designated operational scenarios. Such an evaluative framework significantly advances the rational design of reconfigurable robotic assemblies, allowing for performance optimization in diverse environments.
Experimental validations demonstrate that these robots excel across multiple challenging terrains. Their various configurations facilitate the traversal of wide grooves, negotiation of narrow slits, passage through constrained channels, and navigation of sharp bends and uneven elevated surfaces. This versatility is paramount for deployment in complex real-world environments where mobility constraints are commonplace.
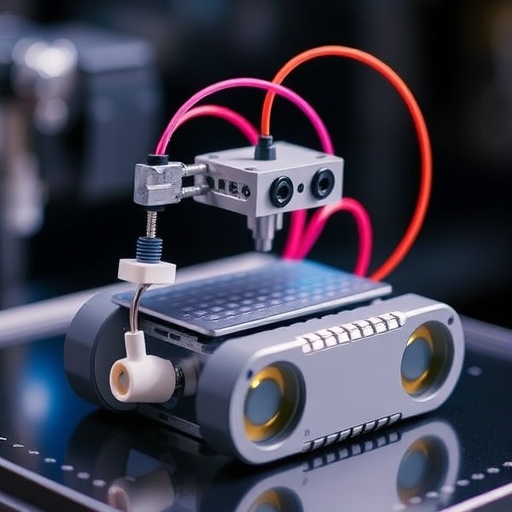
An intriguing extension of the robot’s capabilities is evidenced by the successful integration of a vision sensing unit. This addition empowers the robot with wireless image capturing functions, enabling environmental reconnaissance tasks previously unfeasible at this scale. The built-in ceramic actuation source’s rugged enclosure not only safeguards mechanical elements but also imparts dustproof and waterproof resilience, further extending operational viability under harsh conditions.
The physical architecture of the actuation unit is optimized for performance and durability. The hollow structure design reduces resonant frequency while amplifying vibration amplitude, contributing to efficient locomotion dynamics. Simultaneously, the internal ceramic arrangement enhances durability by providing robust protection, a significant step toward long operational lifetimes in unpredictable environments.
This research exemplifies a pivotal leap towards resolving long-standing challenges associated with the miniaturization and reconfiguration of small-scale robots. The synergy of integrated design and magnetic reconfiguration strategies paves the way for untethered, high-speed mobility with robust adaptability across varied scenarios. These attributes collectively unlock vast potential for applications ranging from environmental exploration to complex multi-task operations in narrowly confined spaces.
Beyond the immediate technical accomplishments, the study opens avenues for future enhancements. Prospective developments may focus on refining actuation efficiency, achieving full integration of control, power, and sensing components within the built-in framework, and introducing autonomous position feedback for improved navigation accuracy. Moreover, incorporating self-reconfiguration mechanisms could significantly broaden the functional scope and deployment flexibility of such robotic systems.
The impact of this research extends beyond the laboratory, promising revolutionary implications for micro-robotics utilized in search and rescue missions, environmental monitoring, and intricate manufacturing processes where spatial constraints and functional versatility are paramount. The demonstrated combination of compactness, speed, adaptability, and sensory capability sets a new benchmark for the design of miniature robots.
This work was conducted by a multidisciplinary team including Yu Gao, Jing Li, Shijing Zhang, Jie Deng, Weishan Chen, and Yingxiang Liu, whose collective expertise has culminated in this seminal contribution. The full, open-access paper titled “Centimeter-Scale Reconfiguration Piezo Robots with Built-in-Ceramic Actuation Unit” is available through the Engineering journal, providing comprehensive technical details and experimental data for the interested scientific community.
Subject of Research: Reconfigurable miniature piezoelectric robots with integrated ceramic actuation units
Article Title: Centimeter-Scale Reconfiguration Piezo Robots with Built-in-Ceramic Actuation Unit
News Publication Date: 4-Apr-2026
Web References:
Image Credits: Yu Gao, Jing Li et al.
Keywords
Robotics, Miniature Robots, Piezoelectric Actuation, Reconfigurable Robots, Ceramic Actuation Unit, Untethered Robots, Wireless Control, Modular Robots, Environmental Reconnaissance, High-Speed Locomotion, Micro-Robotics, Built-in Integration

{kind=link}