{kind=link}
Over the past decade, researchers all around the world have been finding new and exciting use cases for unmanned aerial vehicles (UAVs). Commonly called ‘drones,’ UAVs have proved their worth across many fields, including photography, agriculture, land surveying, disaster management, and even the transportation of goods. It’s no surprise that researchers are now trying to extend the functionality of drones by introducing new parts into their design, the ability to grasp small objects being a prime example.

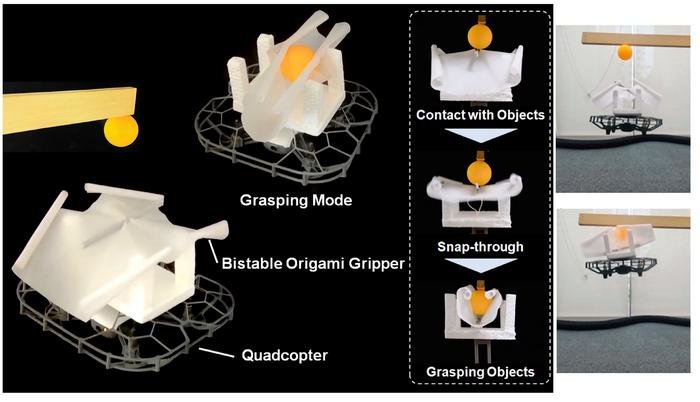
Credit: Hiroki Shigemune from Shibaura Institute of Technology
Over the past decade, researchers all around the world have been finding new and exciting use cases for unmanned aerial vehicles (UAVs). Commonly called ‘drones,’ UAVs have proved their worth across many fields, including photography, agriculture, land surveying, disaster management, and even the transportation of goods. It’s no surprise that researchers are now trying to extend the functionality of drones by introducing new parts into their design, the ability to grasp small objects being a prime example.
However, introducing a grasping mechanism into quadcopters, especially low-cost ones, is quite a challenge. In general, any additional weight added to a quadcopter can compromise its ability to take off and fly stably. This has motivated scientists to look for unorthodox materials and designs that circumvent these issues.
In a recent study, a research team from Shibaura Institute of Technology (SIT), Japan, developed an innovative grasping mechanism for quadcopters using paper. Their work, published in Volume 9, Issue 5 of IEEE Robotics and Automation Letters on March 13, 2024, was led by Associate Professor Hiroki Shigemune from the School of Engineering and included master’s student Shuta Okamoto and Professor Chinthaka Premachandra.
The proposed grasping mechanism makes smart use of origami, the ancient Japanese art of paper folding to produce three-dimensional shapes. When paper is appropriately folded and stacked, the resulting structures can be surprisingly resilient and strong, and origami-based technology has been successfully demonstrated for various applications. However, in most reported cases, origami grippers still needed additional control mechanisms to go from a resting state to a grasping configuration. Moreover, their fabrication can be quite complex, sometimes requiring additional materials beyond just paper to make the devices more flexible, such as plastics and resins.
To address these problems, the researchers from SIT engineered a self-folded origami gripper (SOG) that can fold itself into the final desired structure. Their design is low-cost and relies on a fabrication technique that Dr. Shigemune and colleagues have been developing for about a decade. Using a cutter machine and a regular inkjet printer, one has to merely pre-cut and apply wet ink to a paper sheet in a predefined pattern. The physicochemical reactions between the strategically placed ink and the paper are enough to obtain a self-folding origami piece.
Using this approach, the researchers designed their SOG as a bistable structure. Simply put, the origami piece has two stable conformations, and it retains a given conformation until enough force is applied to make the piece switch, much like a snap bracelet. The team adopted a ‘water bomb’ structure, which changes ‘from a mountain to a valley’ when force is applied directly to its center. The idea is to approach the object to grasp from below and ‘poke’ it with the tip of the mountain, which will snap through and change into a valley. By introducing cylindrical ‘fingers’ around the edges of the water bomb, this change in conformation makes the SOG clutch onto and hold the target object when it ‘closes up.’
Despite being made purely out of paper, the power of this design should not be underestimated. “The SOG itself weighs only 5 grams, yet it demonstrated grasping force equivalent to holding a 130-gram object in our grasping experiments,” remarks Mr. Okamoto. This impressive result stems from a careful theoretical analysis of the SOG’s structure, alongside extensive experimentation. Finally, the researchers successfully tested the proposed SOG on an actual quadcopter tasked with grabbing a spherical object from a wooden branch, obtaining favorable results.
Prof. Premachandra highlights another novelty of their creation: “The developed SOG is made entirely of paper, a biodegradable material. When it falls to the ground due to an accident or deterioration, it simply returns to the soil and does not harm the lives including humans and the environment in any way.” This detail is particularly important, given that quadcopters with grasping capabilities are likely to be used in agriculture, such as during harvesting operations, and for taking samples during land surveys.
Overall, the proposed grasping mechanism could find its way into many modern technological applications involving UAVs. “We hope the SOG proposed in our paper will be the basis for future smart origami devices to make quadcopters multifunctional,” concludes Dr. Shigemune, with eyes on the future.
***
Reference
About Shibaura Institute of Technology (SIT), Japan
Shibaura Institute of Technology (SIT) is a private university with campuses in Tokyo and Saitama. Since the establishment of its predecessor, Tokyo Higher School of Industry and Commerce, in 1927, it has maintained “learning through practice” as its philosophy in the education of engineers. SIT was the only private science and engineering university selected for the Top Global University Project sponsored by the Ministry of Education, Culture, Sports, Science and Technology and will receive support from the ministry for 10 years starting from the 2014 academic year. Its motto, “Nurturing engineers who learn from society and contribute to society,” reflects its mission of fostering scientists and engineers who can contribute to the sustainable growth of the world by exposing their over 9,500 students to culturally diverse environments, where they learn to cope, collaborate, and relate with fellow students from around the world.
Website:
About Associate Professor Hiroki Shigemune from SIT, Japan
Hiroki Shigemune is an Associate Professor at the School of Engineering at Shibaura Institute of Technology (SIT), Tokyo, Japan. He is also associated with the International Research Center for Green Electronics at SIT. He received his B.S., M.S., and Doctor of Engineering degrees in applied physics from Waseda University, Tokyo, Japan, in 2014, 2016, and 2018, respectively. His research interests include self-assembly systems, morphological computation, printing methods, and soft-bodied robotics. As the Director of the Active Functional Devices Lab, has published over 50 research papers and has been cited more than 500 times.
Funding Information
This work was supported in part by the JSPS KAKENHI under Grant JP22K14226, in part by New Energy and Industrial Technology Development Organization (NEDO) under Project JPNP20004, and in part by the Fuji Seal Foundation and International Research Center for Green Electronics at Shibaura Institute of Technology.
Journal
IEEE Robotics and Automation Letters
Method of Research
Experimental study
Subject of Research
Not applicable
Article Title
Paper-based bistable origami gripper to make quadcopters multi-functional
Article Publication Date
13-Mar-2024