In the realm of planetary exploration, current surface missions embody a cautious, methodical approach dictated by the formidable challenges posed by distance and environment. Mars rovers, for example, navigate terrain under severe constraints: communication delays ranging from four to twenty-two minutes introduce latency that mandates pre-planned operations, while bandwidth limitations restrict the volume of data exchange. These factors necessitate slow, deliberate rover movements across hazardous landscapes, enabling exploration of only a fraction of the landing site within given mission timelines. Typically, these vehicles cover mere hundreds of meters per day, which inherently restricts the geological diversity of samples and data collected.
Recognizing these operational bottlenecks, researchers have pivoted toward exploring semi-autonomous robotic systems capable of accelerating planetary surface investigations. This emerging paradigm envisions legged robots that, unlike traditional single-target missions, can independently navigate multiple geological points of interest and autonomously perform scientific measurements. This strategy not only liberates human operators from micromanagement but also promises to vastly increase the throughput of data acquisition and resource scouting on other planets.
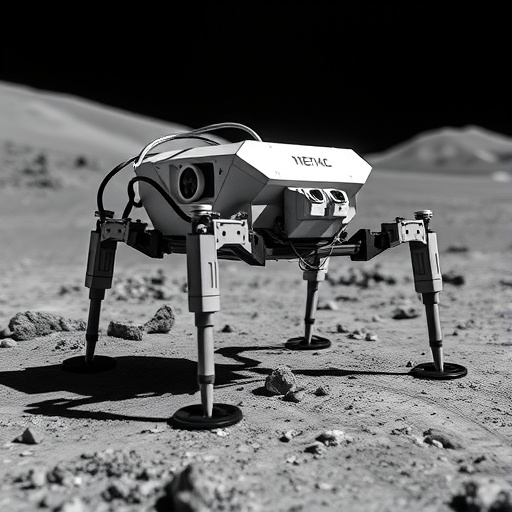
An experimental investigation was conducted using the quadrupedal robot ANYmal, outfitted with a sophisticated robotic arm bearing two compact but scientifically potent instruments: the MICRO microscopic imager and a portable Raman spectrometer, the latter originally developed for the ESA-ESRIC Space Resources Challenge. This collaborative effort involved the Robotic Systems Lab at ETH Zurich, ETH Zurich | Space, the University of Zurich, and the University of Bern, harnessing inter-institutional expertise to push the boundaries of robotic planetary exploration.
The testing ground for these trials was the Marslabor facility at the University of Basel, an analogue environment meticulously designed to replicate planetary surface conditions. Within this facility, a suite of analogue geological samples—including rocks and regolith dust—was illuminated under scene-specific lighting that mimics the natural conditions found on planetary bodies like Mars or the Moon. The robot’s experimental campaign involved autonomously approaching selected targets, precisely deploying its payload instruments to capture microscopic images and Raman spectral signatures, followed by autonomous data transmission for subsequent analysis.
From a scientific perspective, the system demonstrated an impressive capability to differentiate among diverse rock types integral to planetary science and in-situ resource utilization contexts. Identified materials included gypsum and various carbonate minerals, as well as igneous rocks such as basalts, dunite, and anorthosite. Notably, some of these analogues bear direct relevance to lunar exploration: dunite, rich in olivine and oxide minerals, and anorthosite, containing plagioclase feldspar (anorthite), constitute important constituents of the Moon’s highlands. The detection of oxides like rutile further enhances the potential for assessing raw material availability to support sustained human presence beyond Earth.
Comparative analyses between traditional human-guided single-target exploration and semi-autonomous multi-target missions revealed a striking performance differential. Multi-target autonomous expeditions drastically reduced mission durations, completing sequences of measurements in as little as 12 to 23 minutes. By contrast, human-operated missions required approximately 41 minutes to achieve similar analytical outcomes. This acceleration did not come at the cost of scientific accuracy; indeed, in one trial, the robotic system correctly identified the mineralogy of every target evaluated.
The implications of these findings for future planetary exploration missions are profound. The ability of a robot to rapidly traverse terrain, scan numerous geological features, and autonomously report data enables far more extensive surveys of celestial surfaces within the same operational period. This approach effectively transforms planetary rovers into agile field scientists capable of conducting high-throughput reconnaissance, thereby freeing mission scientists to focus analytical efforts on particularly compelling discoveries.
This shift from cautious, stepwise exploration to dynamic, semi-autonomous reconnaissance holds promise for monumental gains in mission efficiency and scientific return. By rapidly generating datasets across multiple locations, robotic explorers could identify key geochemical markers, biosignature candidates, or resource deposits, guiding the allocation of limited operational time and scientific resources to the most meaningful targets.
Technologically, the integration of compact analytical instrumentation with advanced mobility platforms is a critical enabler. The ANYmal platform’s quadrupedal locomotion endows it with enhanced ability to negotiate rugged terrain beyond the capabilities of traditional wheeled rovers, while its robotic arm offers precision manipulation necessary for instrument deployment. The MICRO microscopic imager provides detailed visual characterization at the millimeter scale, whereas the Raman spectrometer supplies non-destructive mineralogical fingerprints based on vibrational spectroscopy, facilitating in-situ geochemical profiling.
Looking ahead, such integrated robotic systems align well with the objectives of space agencies planning ambitious missions to the Moon, Mars, and even asteroids. The growing emphasis on resource prospecting—locating water ice, mineral deposits, or other consumables critical to sustainable extraterrestrial operations—will benefit from high-speed surveys conducted by semi-autonomous robots. Concurrently, the search for biosignatures indicating past or present life becomes more feasible when robots efficiently scan large swaths of terrain, reducing reliance on Earth-based operation cycles limited by communication delays.
Moreover, leveraging compact scientific payloads in combination with autonomous navigation and decision-making frameworks could lower mission costs by reducing the need for large, complex instrument suites. Instead, swift initial reconnaissance could prioritize sites for follow-up by heavier, more sophisticated payloads or even human explorers in future crewed missions. This paradigm supports an iterative exploration strategy maximizing data acquisition while minimizing time-to-insight.
In conclusion, the experimental deployment of a legged robotic explorer equipped with Raman and microscopic imaging capabilities in a Mars simulation environment decisively demonstrates the viability and advantages of semi-autonomous multi-target exploration strategies. This research heralds a new era where robotic agents, adept at both locomotion and in-situ analysis, become central actors in planetary science, radically transforming how humanity approaches the exploration and utilization of extraterrestrial landscapes.
Subject of Research: Not applicable
Article Title: Semi-Autonomous Exploration of Martian and Lunar Analogues with a Legged Robot Using a Raman-Equipped Robotic Arm and Microscopic Imager.
News Publication Date: 31-Mar-2026
Web References: http://dx.doi.org/10.3389/frspt.2026.1741757
References: Frontiers in Space Technologies, 2026
Image Credits: Dr Tomaso Bontognali
Keywords
Planetary Exploration, Semi-Autonomous Robots, Raman Spectroscopy, Microscopic Imaging, Mars Analogues, Lunar Analogues, Robotic Arm, In-situ Resource Utilization, Legged Robot, Autonomous Navigation, Planetary Science, Biosignature Detection

{kind=link}