In a groundbreaking study conducted by researchers at Queen Mary University of London in collaboration with University College London, scientists have unveiled an intriguing new dimension of human tactile perception: the ability to sense objects beneath granular material without direct contact, a phenomenon known as “remote touch.” While humans have long been understood to experience touch as a proximal sense—restricted to areas of direct physical contact—this research challenges that traditional view by demonstrating that the human nervous system can detect subtle mechanical cues transmitted through mediums such as sand, allowing us to locate objects hidden just beneath the surface.
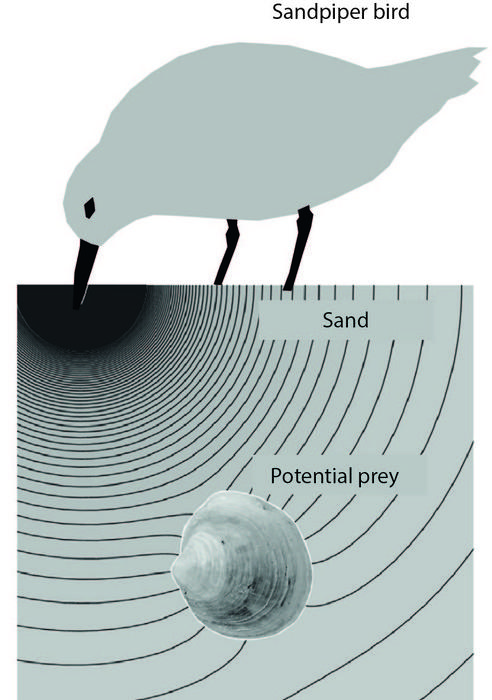
Remote touch is not an entirely new concept in the animal kingdom. Various shorebirds, including sandpipers and plovers, have been documented to utilize this remarkable sense, enabling them to detect prey hidden under layers of sand through minute vibrations and mechanical feedback. These birds possess specialized beak structures finely tuned to picking up these tactile cues, an evolutionary adaptation that supports their foraging behaviors. The Queen Mary University study posed a bold question: can humans, creatures without those specialized anatomical tools, harness a similar sensory faculty?
To explore this, the researchers designed a series of carefully controlled human experiments. Participants were asked to rake their fingers gently through sand to identify the location of a concealed cube, with the critical condition that they had to detect the object before physically touching it. This setup isolated the ability to sense remotely, eliminating cues from direct contact. The experiment’s success was astonishing. Humans demonstrated a formidable capacity to discern the presence of the hidden object, suggesting a complex interplay of mechanoreceptive feedback well beyond simple proximal touch.
Delving deeper, the researchers modeled the physical parameters that facilitate remote tactile perception. They found that human fingers can perceive imperceptibly small displacements in granular material—movements caused by sand shifting when it meets the solid boundary of a buried object. These tactile “reflections” create minute disturbances in the sand surrounding the finger, effectively transmitting mechanical signals that human sensors can interpret, a sensitivity nearing the theoretical limits imposed by the physics of granular media.
What makes this discovery even more compelling is the comparative analysis involving robotic systems. Utilizing a UR5 robotic arm equipped with advanced tactile sensors and trained through a Long Short-Term Memory (LSTM) neural network, the research team evaluated whether artificial systems could replicate or even surpass human remote touch abilities. While robots demonstrated a surprising ability to detect objects from more distant positions within the granular medium, they suffered from a considerably high rate of false positives, resulting in a lower overall precision compared to humans. The human detection precision averaged at 70.7%, significantly outperforming the robot’s 40%. This highlights the unmatched fine-tuning of human tactile perception, even when measured against sophisticated AI-driven machineryand sensors. The robot’s capability, though impressive, revealed inherent challenges in replicating the nuanced discernment that biological touch systems naturally perform.
The implications of such high tactile sensitivity in humans are profound. It reveals that the scope of human tactile perception extends far beyond the skin’s direct contact, repositioning our understanding of sensory boundaries. This expanded sensory “receptive field” suggests that touch can inform us about our environment at a distance, mediated through mechanical interactions within the materials we manipulate. For fields such as haptics, robotics, and assistive technology, this finding opens new frontiers, suggesting that tactile interfaces could be enhanced to exploit these indirect mechanical cues for more refined sensing and interaction.
The human ability to detect buried objects without direct contact has practical applications that reach beyond academic curiosity. Roboticists and engineers envision developing next-generation tactile systems inspired by this human faculty, engineering robots that can probe granular or obscured environments like archaeological sites, planetary surfaces, or underwater sediments with unprecedented delicacy. These robots would benefit from bioinspired designs that mimic the sensitivity and selectivity found in human touch, potentially revolutionizing exploration and excavation methods where visual feedback is limited or nonexistent.
Furthermore, the research suggests avenues for assistive technologies that augment human tactile sensing, enhancing the abilities of individuals working in conditions where vision is compromised or where delicate object detection is required. By integrating sensor data interpreted through machine learning models that emulate human perception, future devices might provide feedback that feels intuitive and natural, supporting a range of applications from medical procedures to search-and-rescue operations in hazardous terrains.
This multidisciplinary study not only bridges psychology, robotics, and artificial intelligence but also exemplifies the synergy of combining biological insights with cutting-edge technology. The experimental human data informed the design and training of robotic sensory systems, while the robots’ performance helped to interpret and validate the subtleties observed in human tactile perception. Such two-way collaboration marks a significant step in understanding sensory systems and advancing robotic capabilities informed by biological principles.
Senior Lecturer Elisabetta Versace from Queen Mary University of London highlights the study’s significance in redefining the perceptual world: “For the first time, we document remote touch in humans, fundamentally changing how we understand the sensory ‘receptive field’ in living beings.” Her statement stresses that this discovery broadens the conceptual framework of touch beyond conventional definitions.
PhD student Zhengqi Chen emphasized the transformative potential of this discovery for technology development: “This opens the door to creating tools and robots capable of sensing delicate tactile cues remotely, suitable for intricate tasks like finding archaeological treasures without disturbance or exploring challenging granular terrains such as Martian soil or ocean floors. It suggests a future where touch-based sensing enables safer, smarter exploration in hidden or hazardous environments.”
Lorenzo Jamone, Associate Professor in Robotics and AI at University College London, praised the interplay between human and robotic studies: “The reciprocal insights between human tactile experiments and robotic sensor training illustrate how integrated approaches in psychology, robotics, and AI can drive both foundational understanding and technology innovation. This collaborative spirit fuels breakthroughs in both natural and artificial sensory systems.”
The methodological framework comprised two main studies—a human experimental assessment measuring fingertip sensitivity to buried objects, followed by a robotic experiment employing an advanced tactile sensor and LSTM-based machine learning algorithms to detect object presence. Both approaches yielded convergent evidence supporting the existence and mechanisms of remote touch, with results nearing the physical detection limits set by mechanical principles of granular materials.
Published in the proceedings of the IEEE International Conference on Development and Learning (ICDL), the paper titled “Exploring Tactile Perception for Object Localization in Granular Media: A Human and Robotic Study” offers comprehensive data and analysis, providing a foundational resource for future research across sensory science and robotic engineering. The study’s publication marks a pivotal moment for the fields, presenting new paradigms for investigating sensory boundaries and bioinspired robotic capability.
By uncovering a previously unrecognized dimension of human tactile perception, this research not only enriches our understanding of the sensory system but also catalyzes technological advancements that could reshape exploration and interaction frameworks in environments traditionally thought inaccessible to the sense of touch. As the boundary of human perception expands, so too do the possibilities for harnessing this insight into practical, impactful innovations.
Subject of Research: People
Article Title: Exploring Tactile Perception for Object Localization in Granular Media: A Human and Robotic Study
News Publication Date: 21-Oct-2025
Web References: https://ieeexplore.ieee.org/abstract/document/11204359
References:
Chen, Z., Crucianelli, L., Versace, E., & Jamone, L. (2025). Exploring Tactile Perception for Object Localization in Granular Media: A Human and Robotic Study. IEEE International Conference on Development and Learning (ICDL). DOI: 10.1109/ICDL63968.2025.11204359
Image Credits: Queen Mary University of London
Keywords: Tactile perception, robotic sensors

{kind=link}