{kind=link}
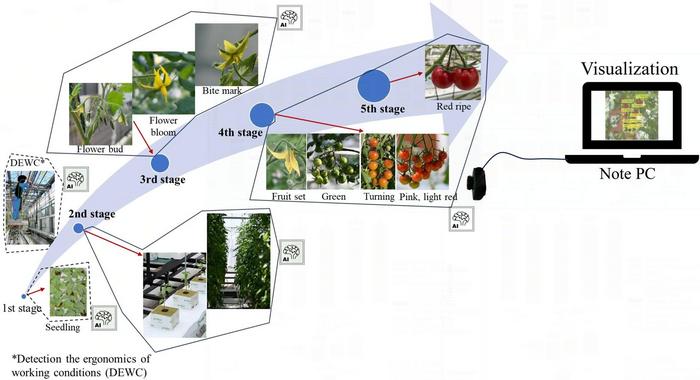
Real-time monitoring of tomato plants in plant factories is necessary to identify and classify diseases at the early stages to prevent possible outbreaks. The proposed DeepD381v4plus network exhibits higher class-wise accuracy, sensitivity, specificity, precision, F1 score and Matthews correlation coefficient scores exceeding 0.96 for multi-varietal tomato leaf diseases. During the reproductive stage, bud formation, flower appearance, bite marks and fruit set also need to be monitored to confirm pollination. The detector DeepDet381v4 – YOLOv4M achieves the highest mean average precision (mAP) (0.90) and lowest mAP (0.68) in the TFl_Blooming class and the lowest mAP (0.68) in the TFl_Transforming class. However, in real-world simulations, DeepDet381v4 – YOLOv4M can detect and count ripe tomatoes at a distance of 40 cm with little to no error. Both networks used for classification and detection–counting tasks are small in size with high classification and detection efficiency (>27 fps). Overall, the proposed experimental approach will help farmers prevent disease outbreaks, monitor flower shapes that can set fruits at the highest rate, detect and count ripened fruits or recognize damaged fruits due to surface cracks or diseases for harvesting at their optimal maturity stage. This will reduce labor costs, improve cultivation management and ensure harvested tomatoesare of excellent quality.

Credit: M.P. Islam, Ehime University
Real-time monitoring of tomato plants in plant factories is necessary to identify and classify diseases at the early stages to prevent possible outbreaks. The proposed DeepD381v4plus network exhibits higher class-wise accuracy, sensitivity, specificity, precision, F1 score and Matthews correlation coefficient scores exceeding 0.96 for multi-varietal tomato leaf diseases. During the reproductive stage, bud formation, flower appearance, bite marks and fruit set also need to be monitored to confirm pollination. The detector DeepDet381v4 – YOLOv4M achieves the highest mean average precision (mAP) (0.90) and lowest mAP (0.68) in the TFl_Blooming class and the lowest mAP (0.68) in the TFl_Transforming class. However, in real-world simulations, DeepDet381v4 – YOLOv4M can detect and count ripe tomatoes at a distance of 40 cm with little to no error. Both networks used for classification and detection–counting tasks are small in size with high classification and detection efficiency (>27 fps). Overall, the proposed experimental approach will help farmers prevent disease outbreaks, monitor flower shapes that can set fruits at the highest rate, detect and count ripened fruits or recognize damaged fruits due to surface cracks or diseases for harvesting at their optimal maturity stage. This will reduce labor costs, improve cultivation management and ensure harvested tomatoesare of excellent quality.
Journal
Computers and Electronics in Agriculture