In the rapidly evolving world of robotics, aquatic environments present some of the most challenging terrains for intelligent machine systems. Recently, a comprehensive review published in the journal Robot Learning casts light on the latest advances in heterogeneous aquatic robotic systems. These systems integrate various types of autonomous and remotely operated vehicles operating underwater, on the surface, and in the air, showcasing a new frontier in marine exploration and environmental stewardship. By harnessing the collaborative strengths of diverse robotic platforms, researchers are forging paths toward more effective, intelligent, and sustainable marine operations.
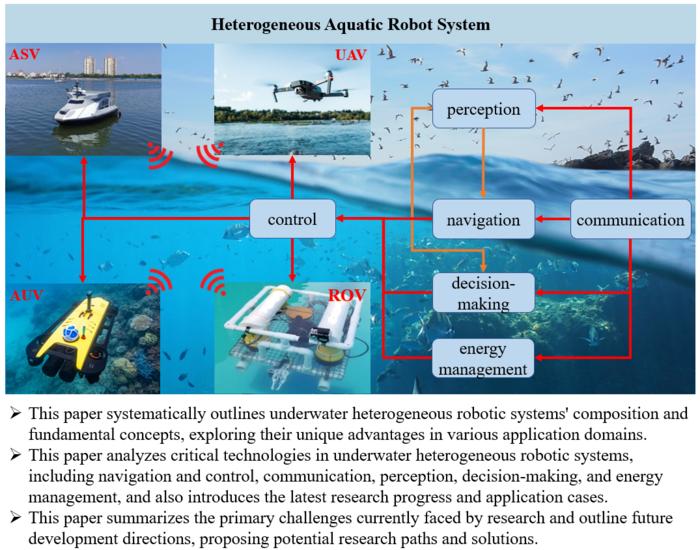
The team behind this groundbreaking synthesis, led by Dr. Weidong Zhang of Shanghai Jiao Tong University in partnership with scholars from Tongji University and Hainan University, presents a sweeping analysis of current technologies essential to heterogeneous aquatic systems. Their work delves into six core technical domains that underpin these robotic networks: communication, perception, navigation, control, decision-making, and energy management. Through a deep understanding of these interrelated areas, this review not only encapsulates the present state of the art but also offers insightful perspectives on future innovation trajectories.
Aquatic robotic networks inherently involve heterogeneity, blending underwater remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), surface vessels, and aerial drones into orchestrated task forces. Each robotic type specializes in unique interaction modes and sensory capabilities, ranging from high-precision sonar imaging below the waves to aerial surveillance above. When combined, these vehicles can perform coordinated operations impossible for any single platform. This heterogeneous integration not only enhances operational flexibility but also significantly mitigates the limitations intrinsic to individual robots navigating complex and dynamic aquatic environments.
One of the most formidable challenges addressed in this survey is communication. Underwater communication remains notoriously problematic due to the physical properties of water, which strongly attenuates electromagnetic signals commonly used in terrestrial wireless networks. Acoustic communication emerges as a primary medium underwater, yet it struggles with limited bandwidth, signal delays, and multipath interference. To overcome these obstacles, current research has been exploring hybrid communication frameworks that integrate acoustic, optical, and radio-frequency methods tailored to varied operational depths and environmental conditions. These efforts are laying the groundwork for robust, high-fidelity data exchange across heterogeneous robot teams.
Perception systems are equally critical in enabling aquatic robots to navigate and interact with their surroundings effectively. Given the distortions and visual occlusions common in underwater environments, conventional cameras often fall short. Therefore, researchers have turned to advanced multi-modal sensing techniques—combining sonar, LIDAR, radar, and environmental sensors—to build richer environmental models. Machine learning, particularly deep learning frameworks, is increasingly leveraged to fuse sensor data in real-time, facilitating enhanced object recognition, obstacle avoidance, and scene understanding. Such perceptual sophistication is crucial for autonomous decision-making and safe maneuvering in hazardous or cluttered maritime settings.
Navigation and control constitute core pillars in orchestrating the movement of these robotic units. Precise localization underwater remains a complex issue as GPS signals cannot penetrate water. Alternative approaches, such as inertial navigation systems (INS), Doppler velocity logs (DVL), and acoustic beacons, are combined to provide reliable positioning. Control algorithms must also account for the nonlinear dynamics of water currents, changing buoyancy, and external disturbances. Advanced adaptive control strategies and cooperative formation control enable these robots to maintain coordinated trajectories and perform group maneuvers. The fusion of robust navigation with adaptive control enhances the overall reliability and effectiveness of the system in mission-critical scenarios.
Decision-making within heterogeneous robotic teams integrates data gathered from diverse sensors and communication channels, presenting unique computational challenges. This review outlines recent advances in distributed decision frameworks that can manage uncertainty, incomplete information, and operational constraints across multiple vehicles. Reinforcement learning approaches enable robots to adapt to changing mission goals and environmental factors autonomously. Furthermore, multi-agent systems research contributes techniques for negotiation and task allocation among heterogeneous platforms, optimizing cooperative behavior without human supervision. Intelligent decision-making is thereby becoming an indispensable capability for maximizing mission success in complex aquatic tasks.
Energy management in aquatic robots is a persistent bottleneck impeding mission duration and operational range. Limited onboard energy capacity, coupled with the high power demands of communication, sensing, locomotion, and computation, necessitates innovative solutions. The review highlights state-of-the-art low-power hardware designs and energy-efficient algorithms tailored for long-term deployment. Promising advancements in energy harvesting technologies—such as wave energy converters and solar panels for surface vessels and aerial drones—offer pathways toward self-sustaining systems. Additionally, coordinated energy management strategies enable heterogeneous teams to share workloads efficiently, extending the collective operational lifespan of the robotic network.
Beyond these technical domains, this survey draws attention to compelling real-world applications demonstrating the potential impact of heterogeneous aquatic robotic systems. Oceanographic monitoring benefits from multi-modal data collection enabled by coordinated vehicles, providing unprecedented insights into marine ecosystems and climate change indicators. In underwater archaeology, combinations of surface drones and AUVs facilitate detailed site mapping, artifact detection, and controlled excavation with minimal human intervention. Emergency response operations also leverage rapid deployment and collaboration of various robotic types to navigate hazardous environments, locate victims, and provide situational awareness in disaster zones.
Despite these promising strides, significant obstacles remain to be addressed for fully mature heterogeneous aquatic robotic systems. The survey underscores issues such as signal degradation at different depths, sensor reliability in turbulent waters, the complexity of real-time multi-robot coordination, and limitations arising from hardware constraints in small unmanned vehicles. The authors emphasize that future research must continue integrating innovations across hardware design, software algorithms, and system architectures to surmount these challenges. Cross-disciplinary collaboration will be paramount to bridging gaps between theory and applied engineering in this dynamic field.
Importantly, the review advocates for the adoption of unified frameworks that can integrate diverse robotic agents into cohesive operable ecosystems. Standardization in communication protocols, data formats, and control methodologies will accelerate interoperability and scalability. The authors also encourage the infusion of artificial intelligence advancements—especially in deep reinforcement learning and multi-agent cooperation—to elevate autonomy and robustness. Such integrative approaches will empower robotic systems to handle the increasing complexity and scale of marine missions envisioned in the near future.
Moreover, the paper points toward exciting possibilities in expanding the role of heterogeneous aquatic robots for sustainable marine resource management. Intelligent, cooperative fleets can monitor fish populations, assess coral reef health, and track pollution levels with greater coverage and precision. These capabilities are vital for informed policy-making and conservation efforts. The potential for robotic systems to reduce human environmental footprints by undertaking risky or labor-intensive tasks is a transformative prospect that aligns with global sustainability goals.
For emerging researchers venturing into this multidisciplinary and technically demanding arena, this review offers a valuable roadmap. It consolidates a wide spectrum of research findings, technological trends, and open questions, facilitating a comprehensive understanding of heterogeneous aquatic robotics. By highlighting both successes and persistent limitations, the article equips scientists and engineers with a clear vision of paths forward and areas where innovation can make profound impacts. The collaboration between established institutions in China underscores the significance and global relevance of this research topic.
In summary, the study titled "Survey on heterogeneous aquatic robot systems: communication, perception, navigation, control, decision-making and energy management" charts the frontier of intelligent aquatic robotic systems with a balanced, systematic, and detail-oriented perspective. It signals an era where diverse robotic agents operate in fluid, synergistic modes, overcoming individual constraints through collective intelligence and adaptive coordination. This promises to revolutionize how humanity studies, protects, and utilizes the oceans, fostering new modes of interaction with one of Earth’s most critical environments.
Subject of Research:
Not applicable
Article Title:
Survey on heterogeneous aquatic robot systems: communication, perception, navigation, control, decision-making and energy management
News Publication Date:
30-May-2025
Web References:
10.55092/rl20250003
References:
Liu R, Hu X, Jiang Z, Wang J, Zhang W. Survey on heterogeneous aquatic robot systems: communication, perception, navigation, control, decision-making and energy management. Robot Learn. 2025(1):0003.
Image Credits:
Shanghai Jiao Tong University, Hainan University
Keywords:
Robot control

{kind=link}