{kind=link}
SAN ANTONIO — May 6, 2024 – Southwest Research Institute is simplifying robotics programming with a new toolkit that embeds computer-aided design (CAD) into robotics motion planning, modeling and execution. The SwRI Workbench for Offline Robotics Development™ (SWORD™) features a user-friendly graphical interface to demystify the fundamental coding required in robot operating system (ROS) application development.
Informed by the Institute’s role in supporting the ROS-Industrial community, SwRI developed SWORD so manufacturing engineers can leverage CAD knowledge to unlock more complex capabilities within the ROS codebase. SwRI manages the ROS-Industrial Americas Consortium and supports ROS-I software repositories, executing training and developer events.
“The traditional ROS workflow is programming-intense, requiring developers to be deeply familiar with available ROS libraries and tools. Even experienced ROS developers can spend significant time on initial setup and configuration,” said Matt Robinson, an SwRI engineer who manages the ROS-Industrial Americas Consortium. “We listened to ROS experts and consortium members to develop SWORD to provide easier access to the ROS motion-planning tools, while sticking to a CAD-based environment that non-developers are familiar with.”
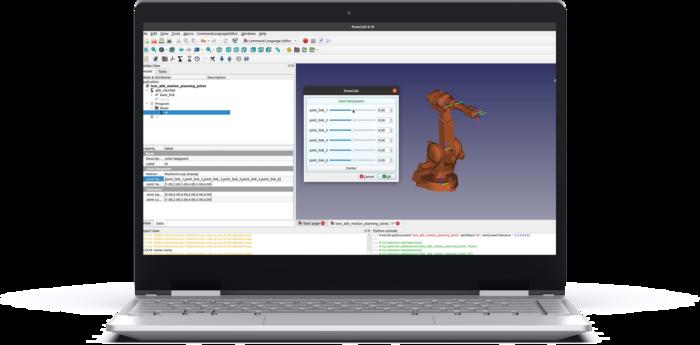
SWORD features a graphical toolkit for setting up motion planning environments and collision geometries. It can also test advanced robotic motion-planning applications. Implemented as a plugin to the open-source FreeCAD application, SWORD allows users to integrate robotics capabilities in a cross-platform CAD environment.
It provides a graphical interface to many powerful motion-planning libraries. The goal is to adapt ROS for manufacturing and industrial audiences in a way that is more approachable in a familiar environment.
“SWORD is designed for both robotics developers and manufacturing engineers familiar with CAD processes and programs on process-oriented systems,” said Jeremy Zoss, an SwRI engineer who helped to develop the software. “SWORD brings advanced motion-planning capability to this audience, allowing them to take advantage of these advanced tools in their operational environments.”
Key SWORD features include:

Credit: Southwest Research Institute
SAN ANTONIO — May 6, 2024 – Southwest Research Institute is simplifying robotics programming with a new toolkit that embeds computer-aided design (CAD) into robotics motion planning, modeling and execution. The SwRI Workbench for Offline Robotics Development™ (SWORD™) features a user-friendly graphical interface to demystify the fundamental coding required in robot operating system (ROS) application development.
Informed by the Institute’s role in supporting the ROS-Industrial community, SwRI developed SWORD so manufacturing engineers can leverage CAD knowledge to unlock more complex capabilities within the ROS codebase. SwRI manages the ROS-Industrial Americas Consortium and supports ROS-I software repositories, executing training and developer events.
“The traditional ROS workflow is programming-intense, requiring developers to be deeply familiar with available ROS libraries and tools. Even experienced ROS developers can spend significant time on initial setup and configuration,” said Matt Robinson, an SwRI engineer who manages the ROS-Industrial Americas Consortium. “We listened to ROS experts and consortium members to develop SWORD to provide easier access to the ROS motion-planning tools, while sticking to a CAD-based environment that non-developers are familiar with.”
SWORD features a graphical toolkit for setting up motion planning environments and collision geometries. It can also test advanced robotic motion-planning applications. Implemented as a plugin to the open-source FreeCAD application, SWORD allows users to integrate robotics capabilities in a cross-platform CAD environment.
It provides a graphical interface to many powerful motion-planning libraries. The goal is to adapt ROS for manufacturing and industrial audiences in a way that is more approachable in a familiar environment.
“SWORD is designed for both robotics developers and manufacturing engineers familiar with CAD processes and programs on process-oriented systems,” said Jeremy Zoss, an SwRI engineer who helped to develop the software. “SWORD brings advanced motion-planning capability to this audience, allowing them to take advantage of these advanced tools in their operational environments.”
Key SWORD features include:
- Environmental Modeling: Create or import a CAD model of your robot, including fixtures and end-of-arm-tooling. Manipulate and control robot model using joint sliders and simulate tool movement with an intuitive dragger to evaluate and calculate joint configurations.
- Robot Manipulation and Planning: Generate motion plans using commercial path planners, creating custom pipelines for application-specific behavior while predicting and avoiding collisions.
- Custom Planning Pipeline: Define robot motion using either coordinate-based or joint waypoints, specifying different movement segment types and motion groups while inserting supplementary commands.
SWORD is officially released, and seats are available. A trial version is available upon request to help you determine if it is right for your organization. To learn more, visit https://sword.swri.org. See a demonstration of ROS May 6-9 at the Automate show in Chicago. Visit SwRI at booth No. 3543.