{kind=link}
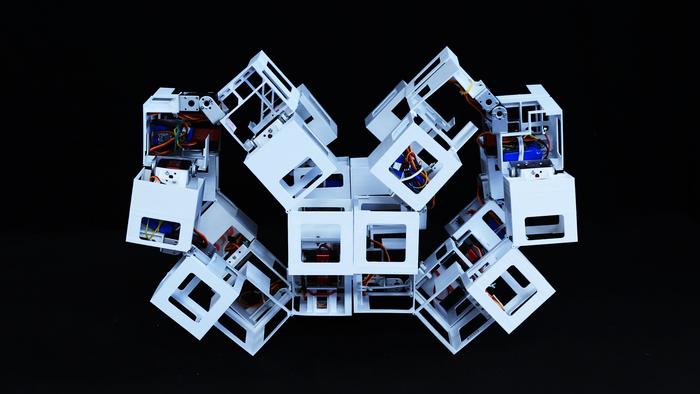
Inspired by the paper-folding art of origami, North Carolina State University engineers have discovered a way to make a single plastic cubed structure transform into more than 1,000 configurations using only three active motors. The findings could pave the way for shape-shifting artificial systems that can take on multiple functions and even carry a load – like versatile robotic structures used in space, for example.

Credit: Photo courtesy of Jie Yin, NC State University.
Inspired by the paper-folding art of origami, North Carolina State University engineers have discovered a way to make a single plastic cubed structure transform into more than 1,000 configurations using only three active motors. The findings could pave the way for shape-shifting artificial systems that can take on multiple functions and even carry a load – like versatile robotic structures used in space, for example.
“The question we’re asking is how to achieve a number of versatile shapes with the fewest number of actuators powering the shapeshifting,” said Jie Yin, associate professor of mechanical and aerospace engineering and co-corresponding author of a paper describing the work. “Here we use a hierarchical concept observed in nature – like layered muscle fibers – but with plastic cubes to create a transforming robot.”
The NC State researchers assembled hollow, plastic cubes using a 3D printer and assembled 36 of them together with rotating hinges; some hinges were fixed with metal pins, while others were activated wirelessly with a motor.
The researchers were able to move the cubes into more than 1,000 shapes using only three active motors. Those shapes included tunnel-like structures, bridge-like structures and even multi-story architectures.
The untethered transformer bots can move forward, backward and sideways – without feet – merely by controlling the ways the structure’s shape changes. The bots can also transform relatively quickly from flat, or fully open, to a boxlike larger cube, or fully closed. The bots also can carry a load about three times their own weight.
Next, the researchers will attempt to make the transformer bots even better.
“We want to make a more robust structure that can bear larger loads,” said Yanbin Li an NC State postdoctoral researcher and co-corresponding author of the paper. “If we want a car shape, for example, how do we design the first structure that can transform into a car shape? We also want to test our structures with real-world applications like space robots.”
“We think these can be used as deployable, configurable space robots and habitats,” said Antonio Di Lallo, an NC State postdoctoral researcher and co-first author of the paper. “It’s modular, so you can send it to space flat and assemble it as a shelter or as a habitat, and then disassemble it.”
“For users, it needs to be easy to assemble and to control,” Yin said.
Hao Su, associate professor of mechanical and aerospace engineering, is a co-corresponding author of the paper. Junxi Zhu, an NC State Ph.D. student, Yinding Chi, a former Ph.D. student at NC State, also co-authored the paper.
The findings appear in Nature Communications. Funding for the research was provided by the National Science Foundation under grants CMMI-2005374, CMMI-2126072 and 2231419.
– kulikowski –
Note to editors: The abstract of the paper follows.
“Adaptive hierarchical origami-based metastructures”
Authors: Yanbin Li, Antonio Di Lallo, Junxi Zhu, Yinding Chi, Hao Su, Jie Yin, North Carolina State University
Published: July 26, 2024, in Nature Communications
DOI: 10.1038/s41467-024-50497-5
Abstract: Shape-morphing capabilities are crucial for enabling multifunctionality in both biological and artificial systems. Various strategies for shape morphing have been proposed for applications in metamaterials and robotics. However, few of these approaches have achieved the ability to seamlessly transform into a multitude of volumetric shapes post-fabrication using a relatively simple actuation and control mechanism. Taking inspiration from thick origami and hierarchies in nature, we present a new hierarchical construction method based on polyhedrons to create an extensive library of compact origami metastructures. We show that a single hierarchical origami structure can autonomously adapt to over 1000 versatile architectural configurations, achieved with the utilization of fewer than 3 actuation degrees of freedom and employing simple transition kinematics. We uncover the fundamental principles governing this shape transformation through theoretical models. Furthermore, we also demonstrate the wide-ranging potential applications of these transformable hierarchical structures. These include their uses as untethered and autonomous robotic transformers capable of various gait-shifting and multidirectional locomotion, as well as rapidly self-deployable and self-reconfigurable architecture, exemplifying its scalability up to the meter scale. Lastly, we introduce the concept of multitask reconfigurable and deployable space robots and habitats, showcasing the adaptability and versatility of these metastructures.
Journal
Nature Communications
Method of Research
Experimental study
Subject of Research
Not applicable
Article Title
Adaptive hierarchical origami-based metastructures
Article Publication Date
26-Jul-2024
COI Statement
The authors declare no competing interests.