{kind=link}
In a groundbreaking study published in Cyborg Bionic Systems, researchers from Shanghai University have unveiled a new artificial intelligence framework that revolutionizes the way robots interpret and execute tasks. The “Correction and Planning with Memory Integration” (CPMI) framework leverages large language models (LLMs) to improve the efficiency and effectiveness of robots performing complex, instruction-based tasks.

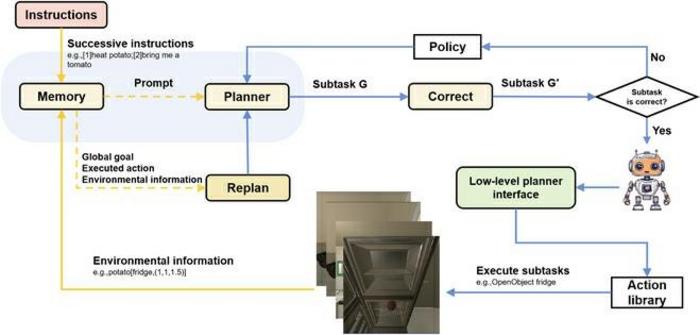
Credit: Yuan Zhang, School of Future Technology, Shanghai University
In a groundbreaking study published in Cyborg Bionic Systems, researchers from Shanghai University have unveiled a new artificial intelligence framework that revolutionizes the way robots interpret and execute tasks. The “Correction and Planning with Memory Integration” (CPMI) framework leverages large language models (LLMs) to improve the efficiency and effectiveness of robots performing complex, instruction-based tasks.
Traditionally, robots required explicit programming and extensive data to navigate and interact with their environment, often struggling with unexpected challenges or changes in their tasks. However, the team, led by Yuan Zhang and Chao Wang, has introduced a dynamic new approach that integrates memory and planning capabilities within LLMs, enabling robots to adapt and learn from their experiences in real-time.
A Leap Forward in Robotic Task Management
The CPMI framework marks a significant departure from conventional methods by using LLMs not just as tools for processing language but as central decision-making elements in robotic tasks. This innovative use of AI allows robots to break down complex instructions into actionable steps, plan their actions more effectively, and correct their course in response to obstacles or errors.
One of the most striking features of the CPMI framework is its memory module, which gives robots the ability to remember and learn from previous tasks. This capability mimics human memory and experience, enabling robots to perform more efficiently over time and adapt to new situations with unprecedented speed.
Demonstrating Superior Performance
The research team tested their framework using the ALFRED simulation environment, where it outperformed existing models in “few-shot” scenarios—situations where robots have limited examples to learn from. The CPMI framework not only achieved higher success rates but also demonstrated significant improvements in task efficiency and adaptability.
“By integrating memory and planning within a single AI-driven framework, we have enabled robots to learn from each interaction and improve their decision-making processes continuously,” explained Chao Wang, the corresponding author of the study. “This not only enhances their performance but also reduces the need for extensive pre-programming and data collection.”
Future Applications and Developments
The potential applications for the CPMI framework are vast, ranging from domestic robots that can better assist in household tasks to industrial robots that can navigate complex manufacturing processes. As LLMs continue to evolve, the capabilities of CPMI-equipped robots are expected to grow, leading to more autonomous and intelligent machines.
The Shanghai University team is optimistic about the future of robotic technology and plans to continue refining their framework. “Our next steps involve enhancing the memory capabilities of the CPMI framework and testing it in more diverse and challenging environments,” said Yuan Zhang. “We believe that this technology has the potential to transform not just robotics but any field that relies on complex, real-time decision-making.”
This research not only sets a new standard for AI in robotics but also opens up new pathways for the integration of advanced AI technologies in everyday life. With the continued development of frameworks like CPMI, the dream of having intelligent, adaptable robots that can perform a wide range of tasks effectively and independently is becoming a tangible reality.
The paper, “Leave It to Large Language Models! Correction and Planning with Memory Integration,” was published in the journal Cyborg and Bionic Systems on Mar 27,2024, at DOI:
Journal
Cyborg and Bionic Systems
Article Title
Leave It to Large Language Models! Correction and Planning with Memory Integration
Article Publication Date
27-Mar-2024