{kind=link}
A research paper by scientists at Beijing Institute of Technology proposed a universal system for remote signal output control using infrared signals.

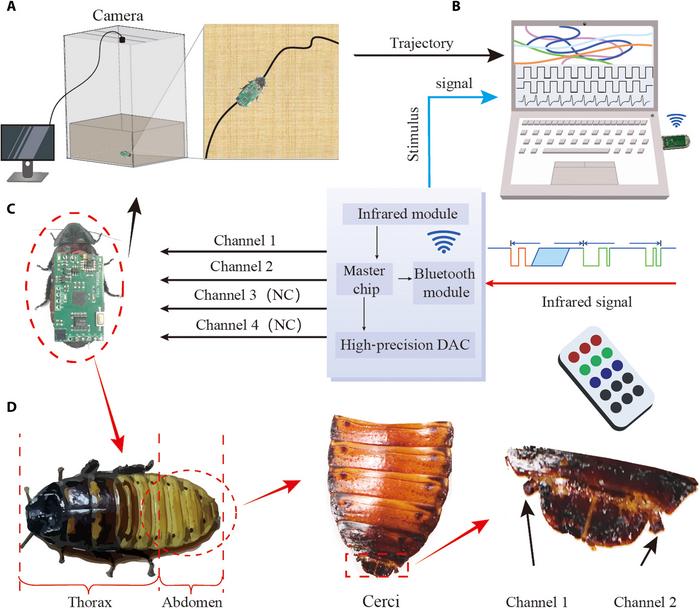
Credit: Jieliang Zhao, School of Mechanical Engineering, Beijing Institute of Technology.
A research paper by scientists at Beijing Institute of Technology proposed a universal system for remote signal output control using infrared signals.
The new research paper, published on Jul. 05 in the journal Cyborg and Bionic Systems, proposed a system that integrates high-precision digital-to-analog converters capable of generating customized waveform electrical stimulation signals within defined ranges. This enhances the accuracy of locomotion control in cyborg insects while maintaining real-time control and dynamic parameter adjustment. The proposed system is verified by experiments.
The integration of electronic stimulation devices with insects in the context of cyborg insect systems has great application potential, particularly in the fields of environmental monitoring, urban surveillance, and rescue missions. “Despite considerable advantages compared to the current robot technology, including flexibility, durability, and low energy consumption, this integration faces certain challenges related to the potential risk of charge accumulation caused by prolonged and repetitive electrical stimulations.” explained study author Jieliang Zhao, a professor at Beijing Institute of Technology. To address these challenges, this study proposes a universal system for remote signal output control using infrared signals. The experimental results show that the signals generated by the proposed system have a success rate of over 76.25% in controlling the turning locomotion of cyborg insects, which is higher than previously reported results. In addition, the charge-balanced characteristics of these signals can minimize muscle tissue damage, thus substantially enhancing control repeatability. This study provides a comprehensive solution for the remote control and monitoring of cyborg insects, whose flexibility and adaptability can meet various application and experimental requirements. “This study provides a comprehensive solution for the remote control and monitoring of cyborg insects, whose flexibility and adaptability can meet various application and experimental requirements.” said study authors.
Biphasic signals have been utilized in some studies for turning control experiments in cockroaches, achieving higher control success rates compared to monophasic signals. However, there remains a paucity of in-depth research on the control potential of biphasic electrical signals. “To address the limitations of existing solutions, this study adopts balanced charge technology and proposes the use of biphasic stimulation signals for insect locomotion control. This approach aims to mitigate the cumulative damage to the insect’s sensory organs caused by electrical stimulation, thereby enhancing the stability and reliability of cyborg insect locomotion control.” said Zhong Liu. In practical demonstrations, the Madagascar hissing cockroach was utilized as a living insect platform. A wireless control system, acting as a “backpack”, was attached to the cockroach’s back to carry out turning control experiments. Directional movements were induced by stimulating the cockroach’s cerci through the outputs from the backpack, thus confirming the efficacy of the proposed system.
This study proposes a cyborg insect locomotion control system capable of generating high-precision analog signals. The proposed system is used to investigate a reliable turning locomotion control strategy for the Madagascar hissing cockroach. Totally, such electrophysiological analysis of brain network will provide a foundation for the advancement of driver assistance systems with distraction control strategies and development of brain-controlled systems, in both conventional human driving scenarios and autonomous driving contexts. The results presented in this study lay a robust foundation for further advancement of various technologies, particularly those related to cyborg insect locomotion control systems and wireless control mechanisms for cyborg insects. Future work could expand the functionality of the proposed insect wireless control system, modifying it into a high-quality platform for cyborg insect research. In addition, wireless control backpacks tailored for different host insects could be designed based on the proposed wireless control system.
Authors of the paper include Zhong Liu, Yongxia Gu, Li Yu, Xiang Yang, Zhiyun Ma, Jieliang Zhao, and Yufei Gu
This work was supported by the National Key R&D Program of China (2021YFB3400200), the National Natural Science Foundation of China (grants 52075038 and 52375282), the National Science and Technology Major Project of China (grant SKS-2022031), and the BIT Teli Young Fellow Recruitment Program (RCPT-20220005).
The paper, “Locomotion Control of Cyborg Insects by Charge-Balanced Biphasic Electrical Stimulation” was published in the journal Cyborg and Bionic Systems on Jul 05, 2024, at DOI: 10.34133/cbsystems.0134.
Journal
Cyborg and Bionic Systems