{kind=link}

Credit: Cyborg and Bionic Systems
This research has broken through the limitations of traditional rehabilitation robot control methods, which often rely on fixed or variable impedance control with no consideration for the patient’s condition and health status. The proposed impedance sliding mode control combined with stiffness scheduling method is not only suitable for active and passive rehabilitation training modes, but also addresses the problem of model-based sliding mode control, reducing system uncertainty caused by limb tremors.
The innovative aspect of this method is its ability to automatically adjust the damping parameters of the rehabilitation robot based on the patient’s applied force. This stiffness scheduling rule ensures that rehabilitation training is more tailored to the patient’s health status, providing a more personalized and efficient rehabilitation experience. The researchers employed a model-free sliding mode control strategy to further enhance the system’s robustness and adaptability.
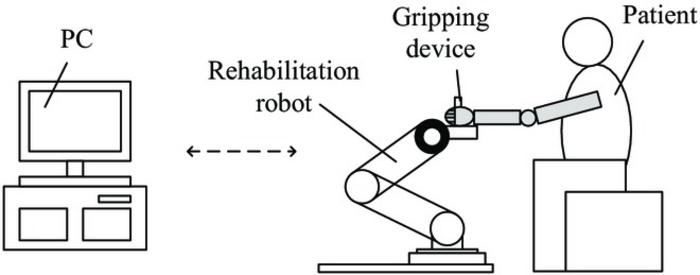
To validate the feasibility and stability of the method, the research team conducted rehabilitation training experiments on a rehabilitation robot. Experimental results have demonstrated the effectiveness of the proposed method, providing new ideas and methods for the development of rehabilitation robot systems.
The findings of this research are significant for the future development of rehabilitation robotics. By combining advanced impedance sliding mode control and stiffness scheduling technology, rehabilitation robots can provide more personalized and effective rehabilitation training, thereby improving patient outcomes and quality of life. This research also demonstrates the potential of combining advanced control techniques with rehabilitation robots to address the challenges facing the healthcare industry in providing efficient and cost-effective rehabilitation services.
The paper, “Impedance Sliding-Mode Control Based on Stiffness Scheduling for Rehabilitation Robot Systems,” was published in the journal Cyborg and Bionic Systems on Jun 1, 2024, at DOI: