{kind=link}
As urban areas continue to grow, the demand for innovative solutions to alleviate traffic congestion and improve transportation efficiency has never been more urgent. A recent breakthrough study presented by researchers from the Shanghai Artificial Intelligence Laboratory as well as international research team introduces a cutting-edge approach to managing traffic at urban intersections using the spatiotemporal-restricted A* algorithm. This advanced method promises to transform how traffic is handled by optimizing the flow of both connected automated vehicles (CAVs) and human-driven vehicles (HVs) through complex city intersections.

Credit: GREEN ENERGY AND INTELLIGENT TRANSPORTATION
As urban areas continue to grow, the demand for innovative solutions to alleviate traffic congestion and improve transportation efficiency has never been more urgent. A recent breakthrough study presented by researchers from the Shanghai Artificial Intelligence Laboratory as well as international research team introduces a cutting-edge approach to managing traffic at urban intersections using the spatiotemporal-restricted A* algorithm. This advanced method promises to transform how traffic is handled by optimizing the flow of both connected automated vehicles (CAVs) and human-driven vehicles (HVs) through complex city intersections.
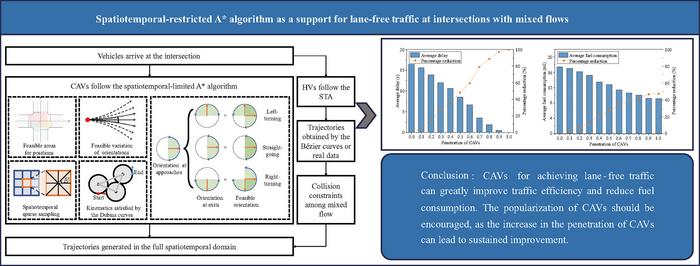
The study focuses on “lane-free” traffic, where vehicles operate without the constraints of traditional lane markers, utilizing the entire roadway in a coordinated and fluid manner. The spatiotemporal-restricted A* algorithm, at the heart of this research, facilitates dynamic and efficient trajectory planning for CAVs, allowing these vehicles to navigate intersections smoothly alongside traditional HVs. This method leverages real-time data and advanced computational techniques to optimize traffic flow, significantly reducing delays and improving overall transportation efficiency.
Key to the algorithm’s success is its ability to handle mixed flows at intersections—a combination of CAVs and HVs. The research demonstrates how integrating CAVs into busy urban intersections can dramatically enhance traffic throughput and decrease fuel consumption. By dynamically adjusting the paths and behaviors of vehicles based on current traffic conditions, the system ensures that all vehicles, regardless of type, can pass through intersections quickly and safely.
The research also introduces several innovative concepts, such as spatiotemporal constraints that define where and when vehicles can move, and a sparse sampling method that speeds up the computational process without sacrificing accuracy or safety. These methods allow the system to efficiently manage the high-density traffic typical of urban environments.
Moreover, the study reveals significant reductions in average delays and fuel consumption as the penetration of CAVs increases. With higher CAV integration, intersections can operate more smoothly, demonstrating the potential for considerable improvements in both traffic management and environmental impact.
This groundbreaking work not only offers a glimpse into the future of urban mobility but also sets a new standard for intersection management in the era of intelligent transportation systems. As cities worldwide strive to manage growing populations and the accompanying traffic challenges, the spatiotemporal-restricted A* algorithm provides a scalable solution that could be adapted to various urban settings.
In conclusion, this innovative approach to traffic management harnesses the power of artificial intelligence and advanced algorithms to revolutionize how we think about and manage urban transportation. It promises not only to enhance the efficiency of our roads and reduce environmental impact but also to pave the way for the broader adoption of automated vehicles in our cities. As the study progresses, further research and real-world applications will likely provide additional insights and refinements, leading to even more robust and adaptable traffic management systems.
References
Title of original paper: Spatiotemporal-restricted A∗ algorithm as a support for lane-free traffic at intersections with mixed flows
Article link:
Authors:
Haifei Chi a b, Pinlong Cai a, Daocheng Fu a, Junda Zhai c, Yadan Zeng d, Botian Shi a
Affiliations:
aShanghai Artificial Intelligence Laboratory, 701 Yunjin Road, Xuhui, Shanghai, 200232, China
bSoutheast University, No. 2 Sipailou, Nanjing, Jiangsu Province, 210096, China
cChina Research and Development Academy of Machinery Equipment, 69 Zizhuyuan Road, Haidian, Beijing, 100089, China
dRobotics Research Centre of the School of Mechanical and Aerospace Engineering, Nanyang Technological University, 50 Nanyang Avenue, Singapore, 639798
Journal
Green Energy and Intelligent Transportation
Method of Research
Experimental study
Subject of Research
Not applicable
Article Title
Spatiotemporal-restricted A∗ algorithm as a support for lane-free traffic at intersections with mixed flows
Article Publication Date
3-Apr-2024
COI Statement
The authors have no competing interests to declare that are relevant to the content of this paper.