{kind=link}
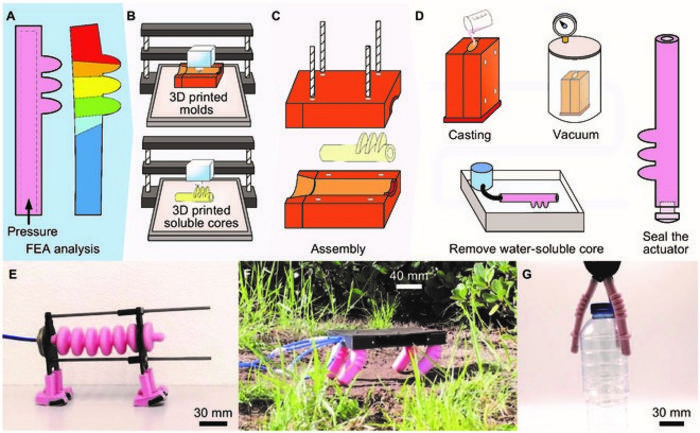
A research paper by scientists at University of Coimbra proposed an integrated approach targeting the design and fabrication of pneumatic soft actuators in a single casting step. Molds and sacrificial water-soluble hollow cores are printed using fused filament fabrication.

Credit: Pedro Neto, Department of Mechanical Engineering, University of Coimbra.
A research paper by scientists at University of Coimbra proposed an integrated approach targeting the design and fabrication of pneumatic soft actuators in a single casting step. Molds and sacrificial water-soluble hollow cores are printed using fused filament fabrication.
The new research paper, published on Jul. 17 in the journal Cyborg and Bionic Systems, presented an integrated process for the design and fabrication of soft robot actuators in a single casting. The author proved the availability, versatility, and effectiveness of the proposed methods, contributing to accelerating the design and fabrication of soft robots.
Bio-inspired soft robots have already shown the ability to handle uncertainty and adapt to unstructured environments. However, their availability is partially restricted by time-consuming, costly, and highly supervised design-fabrication processes, often based on resource-intensive iterative workflows. “We propose fabricating soft actuators using widely available and affordable processes, combining single-step cast molding with the FFF printing of sacrificial water-soluble cores. The actuator’s mechanical operability is defined through FEA using a nonlinear hyperplastic material model.” explained study author Pedro Neto, a professor at University of Coimbra. Although the use of sacrificial mold cores is common in the fabrication of soft actuators, this process is highly dependent on the chamber geometry and requires specific conditions such as the solvent temperature and flow, among other factors. “We propose a heated water circuit to speed up the dissolution of the hollow core’s material, ensuring complete removal from the actuator’s walls, even for intricate chamber geometries” said study authors. The process was validated and demonstrated through the integrated design fabrication of 3 pneu-net inspired actuators featuring bending and linear motion capabilities upon pressurization.
Three actuators capable of bending and linear motion were designed, fabricated, integrated, and demonstrated as 3 different bio-inspired soft robots, an earthworm-inspired robot, a 4-legged robot, and a robotic gripper. “We demonstrate the availability, versatility, and effectiveness of the proposed methods, contributing to accelerating the design and fabrication of soft robots. This study represents a step toward increasing the accessibility of soft robots to people at a lower cost.” said Afonso Silva.
This work presented an integrated process for the design and fabrication of soft robot actuators in a single casting in this work. The FEA effectively assisted in ensuring the mechanical operability and functionality of the actuators, allowing us to anticipate the effects of different input pressures on their elongation and bending. Moreover, FEA-assisted design eliminated the lengthy and costly trial-and-error design-fabrication processes, which often lead to the fabrication of multiple prototypes. In the future, the hyperplastic material models will likely and automatically adapt, not only to the material’s properties but also to the geometry of the actuators. In addition, the printing of sacrificial cores could be achieved using alternative water-soluble materials that are less dependent on storage and printing conditions.
Authors of the paper include Afonso Silva, Diogo Fonseca, Diogo M. Neto, Mihail Babcinschi, and Pedro Neto.
This work was supported by Portuguese national funds through FCT – Fundação para a Ciência e a Tecnologia, [grant numbers UIDB/00285/2020, LA/P/0112/2020, and 2022.13512.BD].
The paper, “Integrated Design and Fabrication of Pneumatic Soft Robot Actuators in a Single Casting Step” was published in the journal Cyborg and Bionic Systems on Jul 17, 2024, at DOI: 10.34133/cbsystems.0137.
Journal
Cyborg and Bionic Systems