Page Not Found
Sorry the page you were looking for cannot be found. Try searching for the best match or browse the links below:
No Result
Latest Articles







-
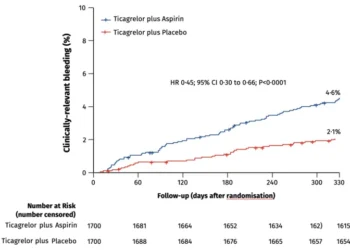
Stopping aspirin one month after coronary stenting procedures significantly reduces bleeding complications in heart attack patients
-
Oregon State researchers advance pigment chemistry with moon-inspired reddish magentas
-
Discovery brings all-solid-state sodium batteries closer to practical use
-
New Phase 1 data from Memorial Sloan Kettering Cancer Center shows an investigational cancer vaccine may elicit lasting immune response in patients with pancreatic cancer
-
Can language models read the genome? This one decoded mRNA to make better vaccines.